車両やドローンの自動運転に向けた
カメラの物体検出の研究が高く評価される
 この度、情報工学専攻博士前期課程2年の吉田錬平さん(次世代マルチメディアシステム研究室/松村哲哉教授)が電気関係学会関西連合大会(開催:令和5年11月25日・26日)において、連合大会奨励賞を受賞しました。関西連合大会は、電子情報通信学会、映像情報メディア学会、電気設備学会および各関西支部からなる実行委員会が主催するものです。毎年本会において、一般講演全部門の中から優秀な講演発表をした満35歳未満の若手研究者に連合大会奨励賞が贈られます。吉田さんが発表した『深層学習を用いた階層型物体検出手法における近傍探索型領域抽出アルゴリズム』は、自動運転において重要な役割を果たすカメラの性能を向上させるための研究です。
この度、情報工学専攻博士前期課程2年の吉田錬平さん(次世代マルチメディアシステム研究室/松村哲哉教授)が電気関係学会関西連合大会(開催:令和5年11月25日・26日)において、連合大会奨励賞を受賞しました。関西連合大会は、電子情報通信学会、映像情報メディア学会、電気設備学会および各関西支部からなる実行委員会が主催するものです。毎年本会において、一般講演全部門の中から優秀な講演発表をした満35歳未満の若手研究者に連合大会奨励賞が贈られます。吉田さんが発表した『深層学習を用いた階層型物体検出手法における近傍探索型領域抽出アルゴリズム』は、自動運転において重要な役割を果たすカメラの性能を向上させるための研究です。
吉田さんの喜びの声と研究について詳しくお話を聞きました。
―連合大会奨励賞受賞おめでとうございます。感想をお聞かせください。
初めての学会発表でしたから、受賞できたことに大変驚きました。賞状が届いて、やっと実感が湧いてきたところです。ご指導くださった松村先生、発表練習を見てアドバイスしていただいた先輩方のおかげだと、深く感謝しています。
―発表した研究について詳しく説明いただけますか。
近年、車両やドローンの自動運転に向けて、カメラに映る人や小型物体を検出する技術の向上が求められています。ドローンなどは高所からの空撮画像を使用するため、高解像度画像を用いた物体検出が必要となりますが、同時にリアルタイムに画像処理を行う必要もあり、高解像度画像を低解像度にリサイズして検出を行っています。それによって、構成画素数の少ない小型物体の検出が難しくなることが課題になっています。そこで私たちの研究室では、深層学習を用いて精度よく小型物体を検出する研究を進めています。先行研究では、3段階で検出する階層型物体検出方法を用い、1層目で大域検出後に領域分割を行い、2層目で小型物体の多い領域に対して再構成画像を生成し局所検出を行い、それらの結果を3層目で統合して小型物体の検出精度を高める提案をしました。

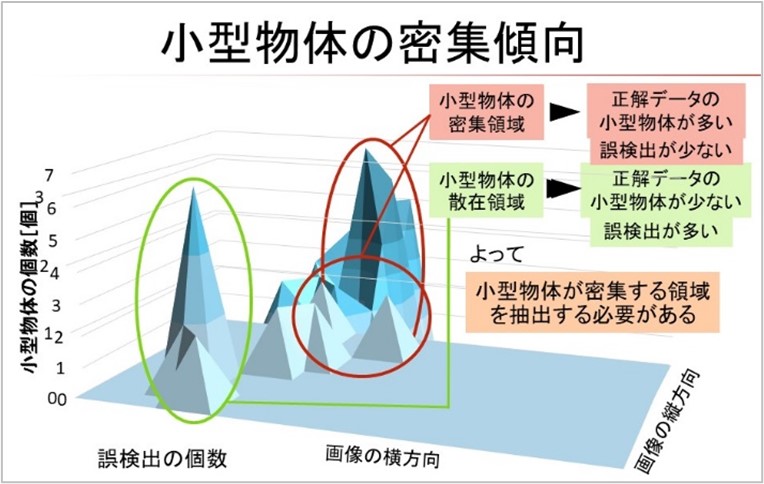
ただし、その検出方法では2層目の再構成画像を生成する際に、分割の境界で物体の断片化が発生することが誤検出の原因となっていました。今回発表した研究では、数だけで物体を検出するのではなく、数の多いところを中心に拡大し、断片化が起きないくらいまで領域を広げて検出を行う近傍探索型領域抽出アルゴリズムを適用しました。
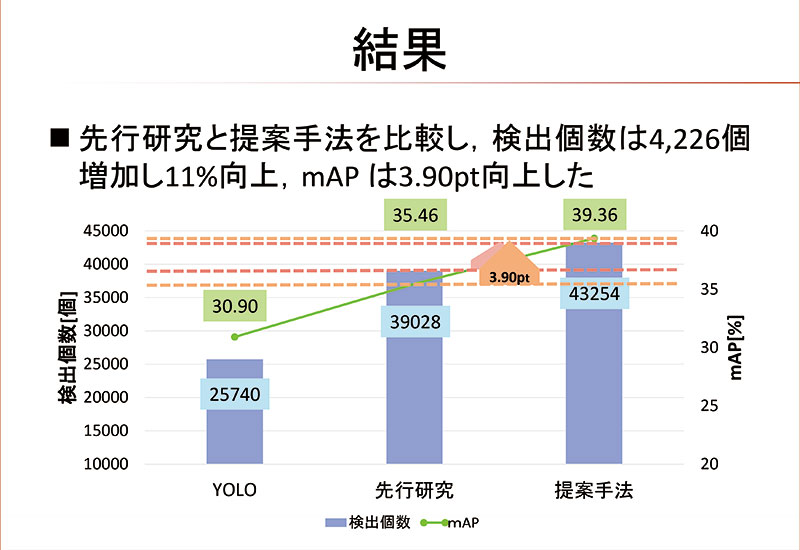 抽出した画像を面積の大きい順にソートし、面積が大きい画像から優先して再構成画像に組み合わせます。これにより、小型物体が密集した領域を効率的に抽出し、再構成画像を生成できたと考えられます。結果、先行研究よりも検出個数は11%、検出物体の正当率を示すmAPも3.90pt向上し、検出精度を高めることができました。
抽出した画像を面積の大きい順にソートし、面積が大きい画像から優先して再構成画像に組み合わせます。これにより、小型物体が密集した領域を効率的に抽出し、再構成画像を生成できたと考えられます。結果、先行研究よりも検出個数は11%、検出物体の正当率を示すmAPも3.90pt向上し、検出精度を高めることができました。
―どんなところが評価されたと思われますか。
 例えば乗り物であっても自動車なのかバスなのかの判別ができていなかったり、処理速度の問題でリアルタイムに検出することが難しいことなど、実用化にはまだまだ改善の余地があります。発表の際にも、実用化に向けての課題について質問がありましたが、これらのことをきめ細かく説明しました。
例えば乗り物であっても自動車なのかバスなのかの判別ができていなかったり、処理速度の問題でリアルタイムに検出することが難しいことなど、実用化にはまだまだ改善の余地があります。発表の際にも、実用化に向けての課題について質問がありましたが、これらのことをきめ細かく説明しました。
発表スライドを丁寧に作成し判りやすくしたこと、また質疑応答に対しても意図を汲み取って誠心誠意答えられたところが評価されたと思います。
―なぜ情報工学専攻に進まれたのですか。
ゲームがきっかけでパソコンに触れるのが好きだったことが、情報工学の道に進んだ大きな理由です。大学で初めてプログラミングを学びましたが、面白いと感じました。大学院に進学したのは、将来エンジニアの仕事に就くためにはもっと知識や技術を高める必要があると考えたからです。それだけではなく、研究室では大学院生が学部生の研究をサポートすることもあり、指導力やマネジメント能力が自然に身につきました。大手企業への就職を目指すなら、大学院生の方が有利だと思います。また、日本大学の卒業生ネットワークは就活での強みになります。手厚いサポートがあり、この大学に入学して良かったと思いました。
―将来の目標をお聞かせください。
国の基盤やシステムをつくるような大きなプロジェクトに携われるシステムエンジニアになることが目標です。ITの力で社会に貢献したいと思います。

―ありがとうございました。今後の活躍も期待しています。
★令和5年電気関係学会関西連合大会はこちら