センシングデータを使った首都高の事故発生時の
交通渋滞を予測する研究が高く評価される
 この度、土木工学科の川崎洋輔准教授が、公益社団法人土木学会の土木計画学研究委員会優秀論文賞を受賞しました。土木学会誌の臨時増刊号として発行されている土木学会論文集には、土木工学に関する理論、実験、設計、計画などの研究論文、創意のある工事の実施、調査報告が掲載されています。川崎准教授の論文『状態空間モデルによる事故発生時の交通流率の推定手法の構築』は土木学会論文集D3(土木計画学)第76巻第5号に投稿されたのものです。土木計画論、国土・地域・都市計画、交通施設計画、環境計画、防災計画、景観・デザイン、土木史等の幅広い分野にわたる土木計画学に関する年間の審査付き掲載論文134編の中から、各審査分野学術小委員の推薦および同小委員会の審議の結果、優秀論文賞に選出されました。
この度、土木工学科の川崎洋輔准教授が、公益社団法人土木学会の土木計画学研究委員会優秀論文賞を受賞しました。土木学会誌の臨時増刊号として発行されている土木学会論文集には、土木工学に関する理論、実験、設計、計画などの研究論文、創意のある工事の実施、調査報告が掲載されています。川崎准教授の論文『状態空間モデルによる事故発生時の交通流率の推定手法の構築』は土木学会論文集D3(土木計画学)第76巻第5号に投稿されたのものです。土木計画論、国土・地域・都市計画、交通施設計画、環境計画、防災計画、景観・デザイン、土木史等の幅広い分野にわたる土木計画学に関する年間の審査付き掲載論文134編の中から、各審査分野学術小委員の推薦および同小委員会の審議の結果、優秀論文賞に選出されました。
川崎准教授の喜びの声と研究について詳しくお話を伺いました。
―優秀論文賞受賞おめでとうございます。感想をお聞かせください。
学術研究ではありますが、実用化を見据えて首都高速道路株式会社、株式会社オリエンタルコンサルタンツ、東北大学との産学連携で取り組んでいる研究ですので、それが評価されたということは大変喜ばしいことであり、今後に向けての励みになります。私自身、大学に勤務する前はコンサルタントの会社にいたこともあり、理論に留まらず、どこまで社会実装に近づけるかを追求しながら研究に挑んでいますので、そういう取り組みが受賞につながったという点でも大変嬉しく思います。
―論文の内容について詳しく説明いただけますか。
私はこれまで、高速道路の監視システムに関する研究に携わってきました。本論文は首都高速道路を対象に、日常的に繰り返される交通渋滞ではなく、突発的な事故発生時の予期しない交通状態を、センシングデータを使って推定するモデルを提案したものです。
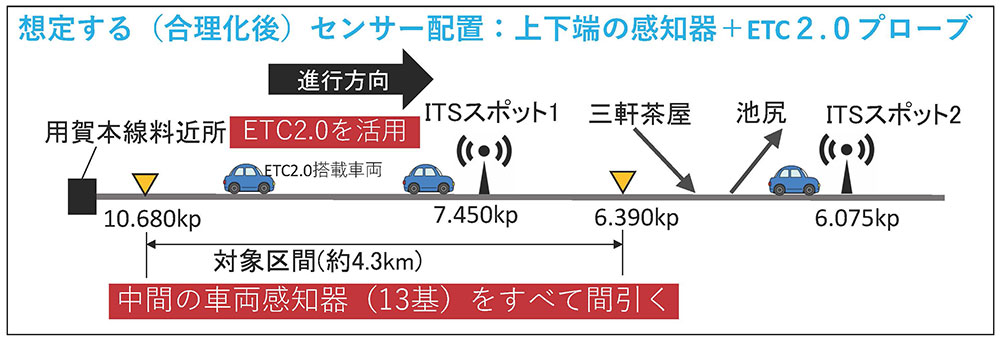
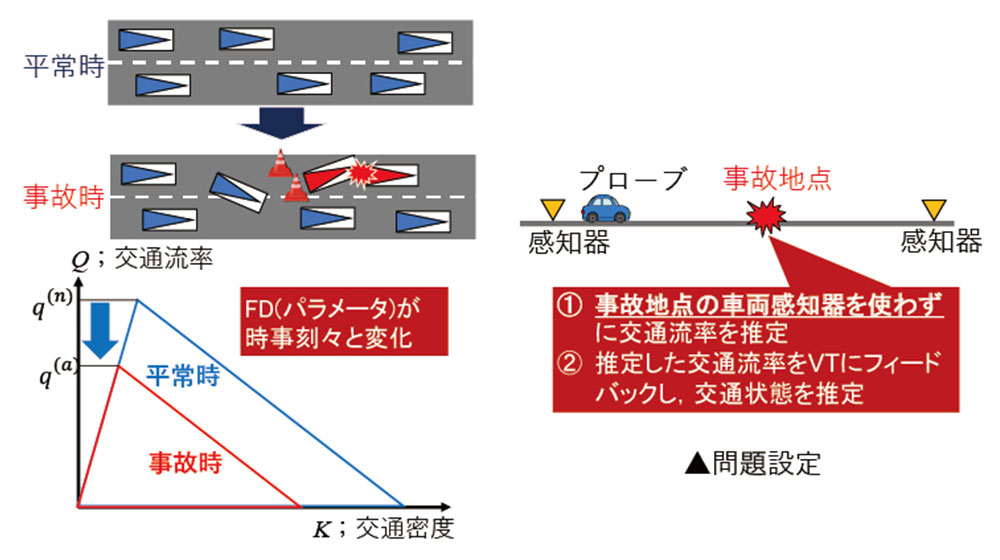
交通管制では、事故発生時の交通流率を把握することが重要ですが、首都高では車両感知器を300m~500mごとに配置しているため、事故発生時の交通流率をリアルタイムに把握することができます。しかし、車両感知器にもメンテナンスが必要で、全てを維持管理していくにはコスト面での課題があります。現状の感知器数を減らして合理化を図るために、中間の車両感知器を間引き、交通流モデルの解法の一つであるVT(Variational Theory)を活用して、車両感知器とプローブデータを融合した交通状態推定手法を用いることが考えられます。ただし、この交通流モデルは平常時を対象にしており、事故発生時に適応することができません。事故発生時は車線が封鎖され、事故地点の交通流率が低下して大渋滞が起こるため、特殊な交通状態を推定したモデルが必要になります。そこで、VTを状態空間モデルに拡張し、事故発生地点(場所、時刻)の条件下で流率密度関係を表すFD (Fundamental diagram)の時系列変化を捉えることで、事故発生時の交通流率の推定を試みました。その結果、車両感知器と同程度に精度よく交通流率を推定することができるとともに、事故後の交通流率の低下と事故渋滞解消時の交通流率の回復の過程をモデルが追随している様子が確認できました。
―どのような点が評価されたと思われますか。
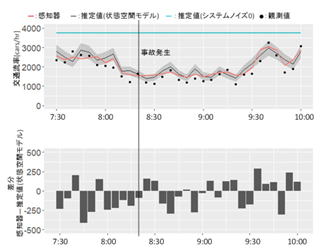
交通流率の推定結果および車両感知器との差分
―研究の面白さ、魅力についてお聞かせください。
事故の渋滞は交通理論で解けないところに面白さがあります。渋滞は繰り返し起きる現象なので、日々のデータからどこまで渋滞が続くか、どれくらいの速度で流れるかをモデル化できるのですが、事故はどこで起きるかわからない、また、事故による渋滞は、いつも同じような状況になるというものでもない。二度と見られないノンリカレントな渋滞を対象としている点がこの研究の醍醐味とも言えます。例えば天気予報は、3時間ごとに得られた観測データをもとに降水確率を出していきます。同じように、渋滞推定も過去から現在までの一部の交通データから、道路全体の渋滞発生確率を計算して、一番高い確率で発生しうる交通状態を示していくという手法です。いつどこで雨が降るかわかれば、人々が行動しやすくなるように、いつどこで渋滞が発生するか推定できれば、自動車を運転する人々への有益な情報になります。確実なものを明らかにしていくチャレンジングな研究ではありますが、やりがいと魅力を感じています。

―今後の目標についてお聞かせください。
将来的には管制システムに導入することが目標になります。事故による渋滞状況を可視化して監視員や専門家でなくてもわかるようにしたいと考えています。想定した通りシステムが100%稼働すれば実用化される可能性は高くなりますが、それには実際に近いバーチャル環境での実験を繰り返し、落下物による事故や二次災害も含めて起こり得る様々な状況を考えて精度の高い情報を提供できるシステムにする必要があります。長期検証によるシステムのロバスト性評価など、まだまだ研究しなければならないことがありますが、どこで起きるかわからない事故の渋滞状況が把握できれば、どんな状況にも適応できるシステムになるでしょう。将来的には、管理コストのかかる設置型センサを現状よりも間引いて、効率の良い交通管制システムの実現に寄与したいと考えています。
また、私は、この研究の他にも、災害が発生した際、安全で円滑な交通網を維持するために、令和元年東日本台風発生時の交通状況などから、多様なセンシングデータを解析してネットワーク交通流の状態推定や災害時のモビリティ支援対策の研究を行っています。さらに、渋滞推定モデルやセンシングデータ解析手法を応用して、ETC機器の寿命予測や橋梁、道路の維持管理など、土木分野のハード面の研究も視野に入れています。土木工学科の先生方と協力してインフラの長寿命化などに取り組んでいけたらと考えています。