Mechanical Lab
サステナブルロボット
システム研究室
教授:武藤 伸洋 / 専任講師 :今林 亘
100年使えるロボットシステム開発に挑戦!
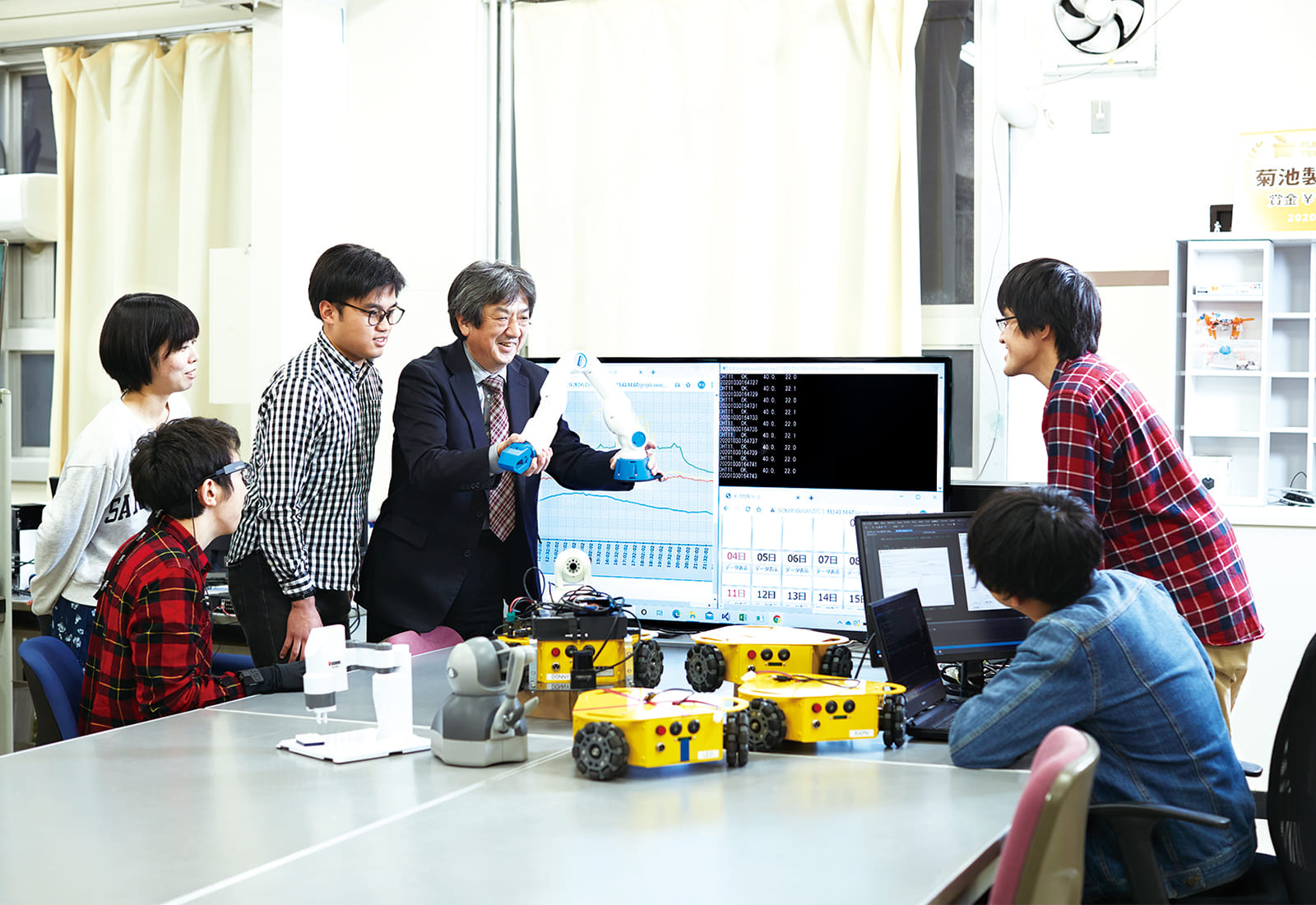
本研究室では、長期にわたって利用可能なロボットシステムの開発研究を積極的に進めています。ロボットを長く利用するには、多岐にわたる技術が必要です。例えば、遠隔地にいるロボットをネットワークを介して遠隔操作する場合、直感的な操作が可能なインターフェースが不可欠です。また、ロボットから得られるセンサ情報や人工知能技術を駆使して、環境の変化に柔軟に対応できるよう取り組んでいます。さらに、ロボットの運動モデルを正確に理解し、適切な駆動力を算出ための制御アルゴリズムの開発も行います。最後に、本研究室では学生が古典的な技術から最先端な技術まで幅広く学び、それをロボット開発に応用することができるようサポートしております。また、技術の体得だけでなく、ロボットのシステムインテグレーションを経験することにより、End to Endでの活躍が可能なエンジニアを養成します。そして、学術的研究のみならず、産業界や地域社会において実用的な価値を持つ成果を生み出すことにも力を注いでいます。

研究テーマ
- ロボット・センサ技術を統合したリモート作業支援ロボットシステム
- ロボットアーム・移動ロボットの操作インタフェースの開発
- モーションキャプチャによるロボット操作テクニックの解析
- 長く使えるエネルギ活用システムのIoT化
教授:武藤 伸洋
- 脚歩行ロボットの運動制御アルゴリズムの開発
- モバイルロボットを用いた隊列走行制御の実現と応用
- シープドッグシステムから学ぶロボット制御システムの開発
- 制御工学教育システムの開発
- 不整地移動ロボットの振動を抑える制御技術の開発
専任講師:今林 亘
実験設備・装置
-

1.アカデミックスカラーロボット
-

2.NEXUSROBOT
-

3.DOBOT magician
-

4.CRANEX7
-

5.UnitreeGO1
-

6.CUGOV3
-

7.モーションキャプチャシステム
-

8.m3pi ロボット
-
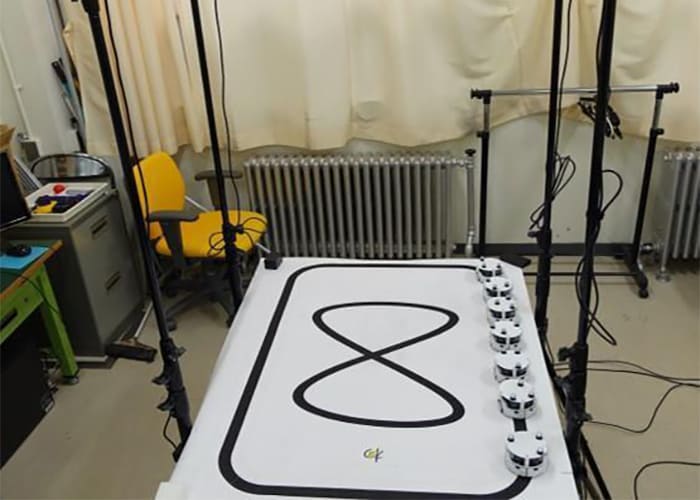
9.隊列走行実験環境
-

10.シープドッグシステム実験環境
-
10.制御工学教育キット
-

12.3Dプリンタ
- アカデミックスカラーロボット
- NEXUSROBOT
(オムニホイールロボット) - DOBOT magician
(マニピュレータ) - CRANEX7 (マニピュレータ)
- UnitreeGO1 (4脚歩行ロボット)
- CUGOV3 (クローラ型ロボット)
- モーションキャプチャシステム
- m3pi ロボット
(モバイルロボット) - 隊列走行実験環境
- シープドッグシステム実験環境
- 制御工学教育キット
- 3Dプリンタ

機械工学は未来を形づくる一つの鍵です。ロボット工学、エネルギー工学、バイオメカニクスなど、技術の最前線で革新を起こしています。これらの学問は、高校で学んだ数学や物理が基礎となっています。機械工学科では、未知の領域を探求し、問題を解決するためのツールを手に入れます。興味を持つことは、新しい世界を開く第一歩です。未来の技術をリードし、社会に貢献するための扉がここにあります。私たちと一緒に、未来の世界を築く手助けをしてください。
「ロボット作り」に携わることは楽しくて魅力的な活動の一つです。ロボットの研究室に入るための道のりは、長くて険しいものとなりますが、あきらめずに努力を続けてください。自分自身の軸を持ち、得意なことと苦手なことを見極めた上で、広い視野を持って日々の生活を送ってください。あと、数学や物理といった座学のみならず、漫画、アニメ、ゲーム、経済、社会といった多様な領域に興味を広げて貪欲に学び続けてください。