2020-02 産官学連携 Drone Project for LOHAS Engineering aimed at bridge inspection
ロハスのドローンプロジェクト【橋梁点検チーム】
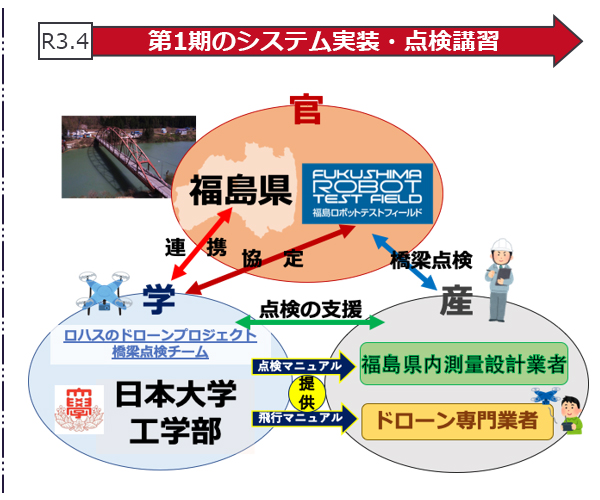
福島モデルとなる橋梁点検システムの構築を目指す
概要
近年、劣化が進行した橋梁の数が増加の一途をたどっています。こうした状況の中、橋梁の近接目視点検は、専門作業員によるロープアクセス等によって行われていますが、作業従事者の確保や安全性が大きな課題となっています。点検者の減少を鑑みると合理的かつ効率的な橋梁点検技術の確立が急務です。そこで、本プロジェクトでは、橋梁技術者が容易に近接目視で点検できない部位を対象に、ドローンを用いて、安全かつ効率的に精緻な画像(あるいは点群データ)を取得し、AI等を活用して橋梁専門技術者の診断に資する有用な情報を提供する技術の開発を行います。また、福島ロボットテストフィールド(RTF)との連携・協力を図ることにより、この点検システムを福島県内の橋梁へ展開し、県内の橋梁点検事業者が活用できる仕組みを構築することを目指します。
◆本プロジェクトの内容とマイルストン
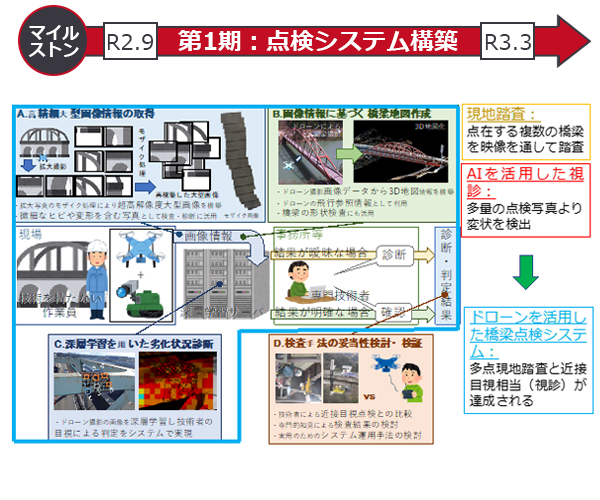

RTFの実物大の橋を活用した飛行試験

ドローンを使った福島県内実橋での点検

ドローンで撮影した橋梁床版下面の画像
◆令和4年度の成果
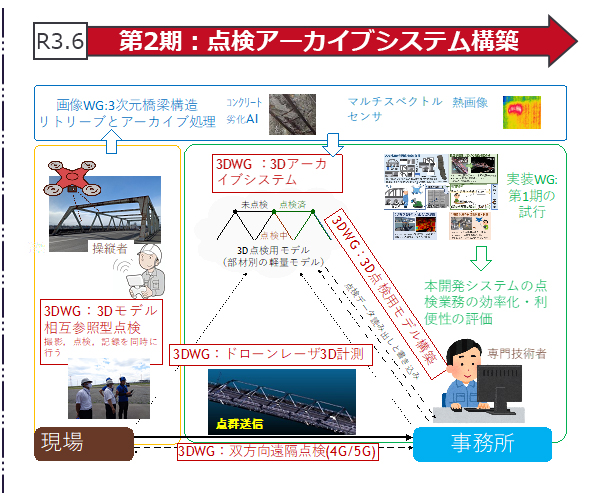
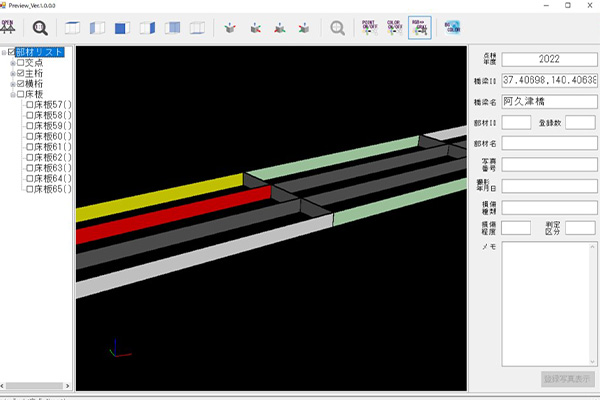
(1)双方向通信と3Dモデルによる遠隔点検のシステム構築
ドローンによる点検結果を保存整理でき実務者が即時利用可能な1)点検情報登録ソフトウェア、2)橋梁情報登録ソフトウェアなどを開発した。


(2)ドローン自己位置推定手法の開発
加速度センサを用いた位置推定の性能検証を行った。

図3 加速度センサ
(3)機械学習による橋梁(鋼部材とコンクリート部材)診断の技術開発
福島県の道路橋点検結果に基づくトレーニングデータに用いた変状検出器となる学習モデルの構築を進め、分類精度がさらに高まった。
プロジェクトメンバー